Koordinatensystem definieren
Übersicht
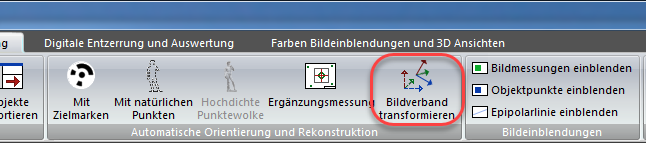
Sie können auf mehrere verschiedene Arten ein Koordinatensystem in einem Bildverband definieren oder den Bildverband georeferenzieren, klicken Sie auf "Bildverband transformieren":

Den Bildverband auf ein neues Lokales Koordinatensystem transformieren
Benötigt werden:
- 3 Punkte die das Koordinatensystem definieren werden: 1 Startpunkt einer Achse, 1 Punkt in positiver Richtung auf dieser Achse und 1 Punkt der eine Ebene mit dieser Achse aufspannt.
- Mindestens 1 bekannte Strecke, besser 2-3 bekannte Strecken.
Funktion:
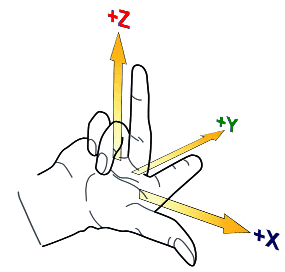
Der Bildverband wird mit einer Ähnlichkeitstransformation in ein neues Koordinatensystem überführt. Das Koordinatensystem kann man sich einfach mit der Rechten Hand Regel visualisieren:
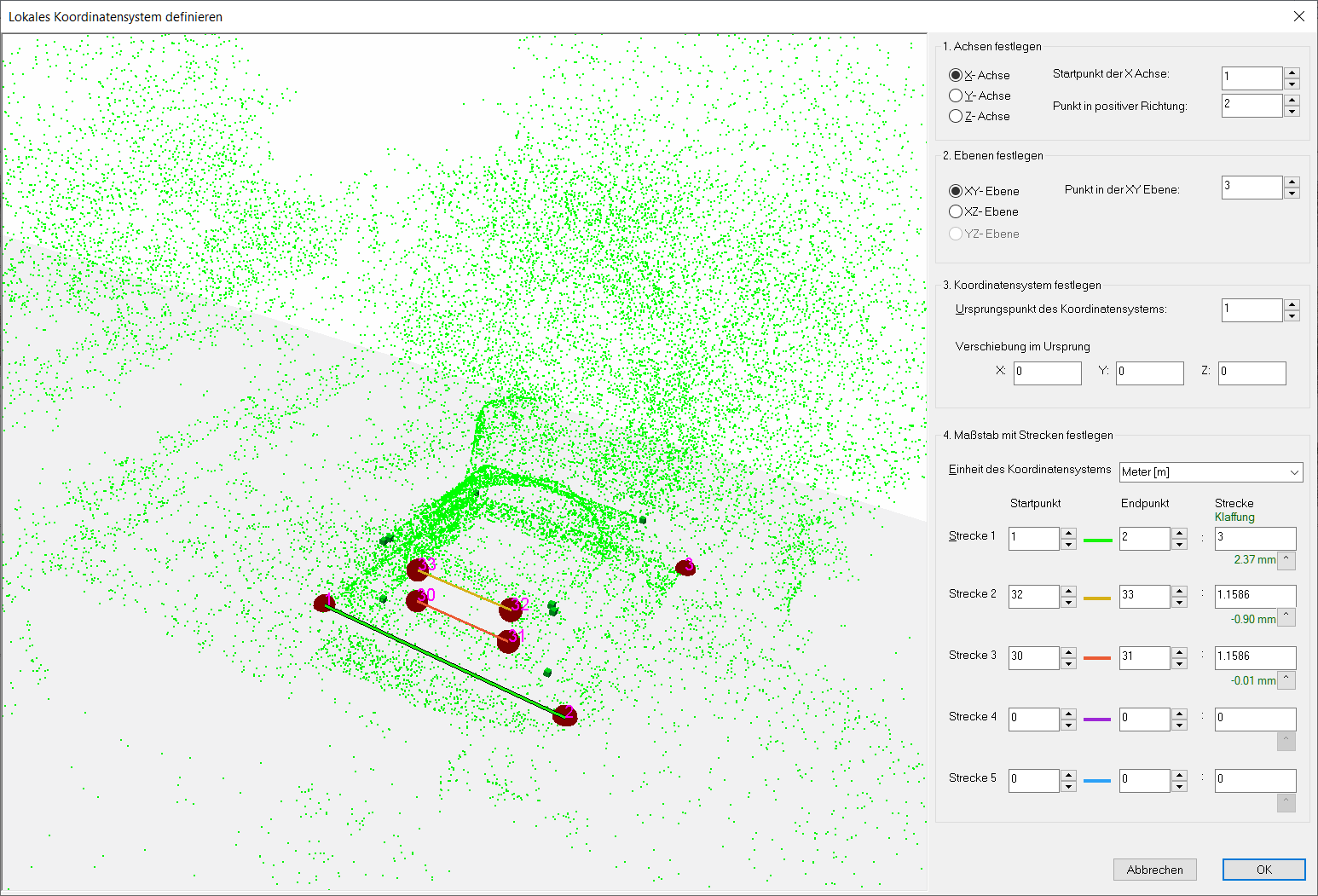
Es sind nur Punktnummern anwählbar, die schon als Objektpunkte in dem Projekt existieren. Unmögliche bzw. nicht existente Punktkombinationen werden in Rot angezeigt.
In der 3D Ansicht werden die gewählten Achsen als orange Linie, die gewählte Ebene als halbdurchsichtige Fläche dargestellt.
X,Y,Z - Achse festlegen, Startpunkt der X,Y,Z - Achse
Mit diesem Feld kann der Startpunkt einer Achse festgelegt werden. Wird eine Achse festgelegt so werden in dem Feld "Ebenen festlegen" automatisch jene Einträge gedimmt, die nicht möglich sind.
Punkt in positiver Richtung.
Hier muss ein Punkt ausgewählt werden, der in einem orthogonalem Rechtssystem in positiver Richtung auf der gewählten Achse liegt. Wird das nicht beachtet, so steht das Koordinatensystem auf dem Kopf.
Punkt in der XXX Ebene
Mit diesem und den 2 oberen Punkten wird die Definitionsebene des Koordinatensystems aufgespannt. Er muss nicht irgendwie "rechtwinklig" zu den anderen Punkten sein. Er sollte aber mit den Achsendefintionspunkten ein möglichst großes Dreieck aufspannen.
Ursprungspunkt des Koordinatensystems.
Dieser Punkt erhält die Koordinaten 0,0,0 in dem neuen lokalen Koordinatensystem.
Verschiebung im Ursprung
Hier kann eine Verschiebung des Ursprungspunktes eingegeben werden. Dies kann für Sonderanwendungen nützlich sein.
Maßstab mit Strecken festlegen
Hier muss mindestens eine Strecke als Maßstab für das Koordinatensystem eingegeben werden. Besser sind zwei Strecken, dann kann ELCOVISION 10 einen Maßstabsfehler feststellen, am besten sind drei Strecken, dann kann es eine Fehleingabe identifizieren. Die Klaffungen zu den anderen Strecken wird direkt unter den Eingabefeldern angezeigt, sind diese zu groß werden sie rot eingefärbt. Mit durch klicken auf ^ unter dem Eingabefeld können die Werte übernommen werden.
Einheit des Koordinatensystems.
Diese Information ist z.B. für das maßstäbliche Ausdrucken von entzerrten Bilder nötig, oder wenn man die Daten aus ELCOVISION 10 in andere Programme exportieren will.
Hinweise – Typische Fehlerquellen
Die Strecken sollten in derselben Größenordnung wie das Objekt sein damit es nicht zu zusätzlichen Fehlern durch Extrapolation eines kleinen Messfehlers an der Skalierungsdistanz kommt:


Es sollten mindestens 2 Strecken verwendet werden: Dann kann das Programm einen Fehler in den Streckenmessungen feststellen. Werden 3 oder mehr Strecken verwendet so kann das Programm die Strecke mit dem größten Fehler identifizieren.
Die häufigsten Fehler sind:
- Strecken Endpunkte wurden an einer falschen Stelle gemessen.
- Beim Notieren der Strecke wurde ein Fehler gemacht, meistens sind es Übertragungsfehler wie Zahlendreher.
- Bei der Verwendung von Nivellierlatten: Eine der Latten wurde nicht vollständig ausgezogen.
Den Bildverband auf ein Passpunktfeld transformieren oder georeferenzieren
Benötigt werden:
- Mindestes 4 in den Bildern gemessene, gut über das Objekt verteilte Passpunkte
- Passpunktdatei im ELCOVISION 10 .coo Format oder Leica GSI Format
Funktion:
Der Bildverband wird mit einer Ähnlichkeitstransformation ein neues Koordinatensystem überführt.
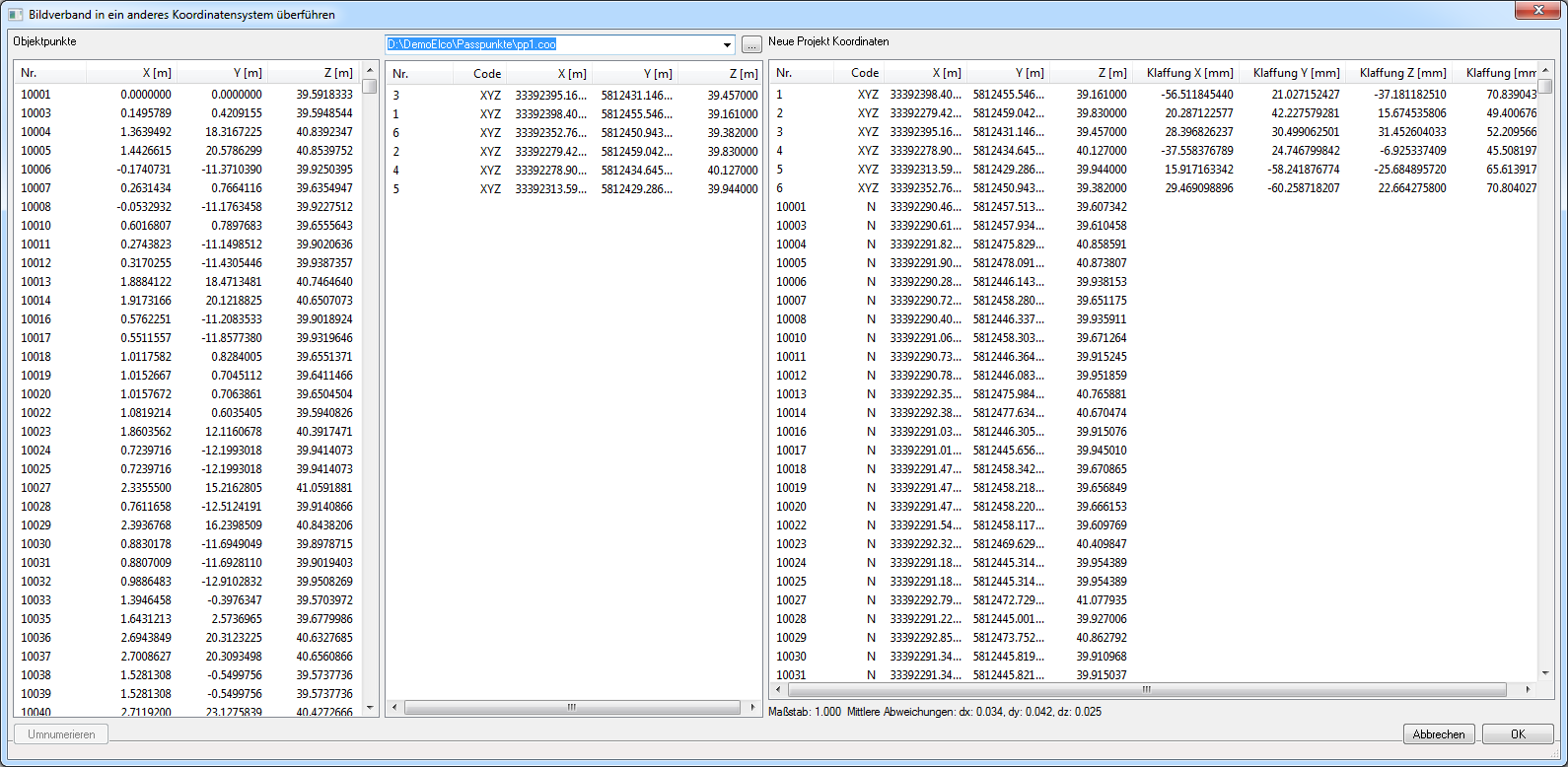
In der linken Spalte des Dialoges sehen Sie die Koordinatenwerte der Objektpunkte im aktuellen Koordinatensystem, in der mittleren Spalte die Koordinaten der Passpunktdatei, in der rechten Spalte sind die transformierten Koordinatenwerte und die Restklaffungen an den Passpunkten. Wird der Dialog beendet wird optional noch eine neue Globale Orientierung durchgeführt. Damit können die Restklaffungen und fehlerhafte Messungen gefunden und beseitigt und die Genauigkeiten erhöht werden.
Hinweise
Bei terrestrischen Aufnahmen, wie z.B. Gebäude: Die Passpunkte sollten gut über das Objekt verteilt sein und nach Möglichkeit auch in unterschiedlichen Höhen sein, es sollten 4-5 Punkte pro Fassade gemessen werden.
Luftbildaufnahmen mit Drohnen ohne RTK – GPS
Sehr gut funktionieren folgende Methoden:
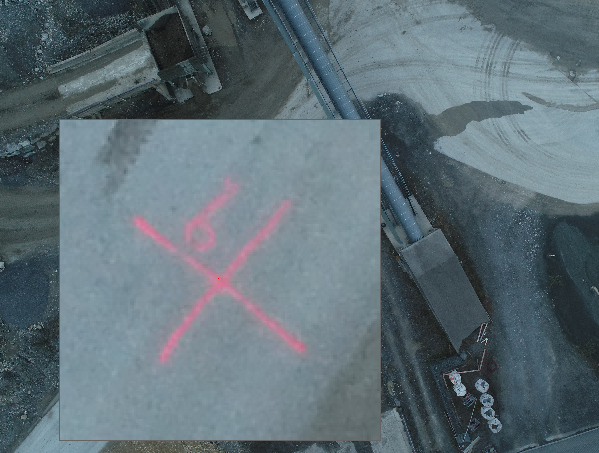
Mit Kreidespray in Kontrastfarbe zum Boden ein Kreuz aufsprühen und daneben die Punktnummer aufsprühen, damit sind Punktverwechslungen fast ausgeschlossen:
Herkömmliche Zieltafeln: Hier muss man allerdings aufpassen dass die Schwarzen Quadrate nicht überblendet werden:

Eine CD oder DVD mit Kontrastfarbe lackieren oder mit der goldenen bzw. silbernen Seite nach oben auf den Boden legen und fixieren. Das Loch der CD ist ein idealer Punkt für eine GPS Messung, die CD selbst kann mit einem Kreisfadenkreuz der Lupe sehr genau eingemessen werden:

Typische Fehlerquellen
Die Koordinaten in der Passpunktdatei sind in einem Linkskoordinatensystem:
Die Transformation funktioniert dann entweder gar nicht oder nur mit sehr großen Klaffungen zu den Passpunkten.
Vermeidung: Verwenden Sie die GSI Datei aus dem Instrument, ELCOVISION 10 macht dann die allfällige Transformation in das Rechtskoordinatensystem automatisch.
Ein oder mehrere Passpunkte wurden verwechselt oder an einer falschen Stelle gemessen:
Es gibt ebenfalls große Klaffungen oder die Transformation funktioniert nicht.
Hilfe: Wenn mehr als 6-7 Passpunkte gemessen wurden und mindestens 5 sind davon richtig gemessen sind findet ELCOVISION 10 meistens die falschen oder verwechselten Passpunkte und verwendet Sie nicht zur Transformation des Bildverbandes.
Die Bildstandpunkte auf deren bekannte Standpunkte transformieren oder georeferenzieren
Benötigt werden:
- Bilder mit GPS Information in den Exif Daten
- oder Datei mit GPS Standpunkten der Bilder
Funktion:
Der Bildverband wird mit einer Ähnlichkeitstransformation in ein neues Koordinatensystem überführt.
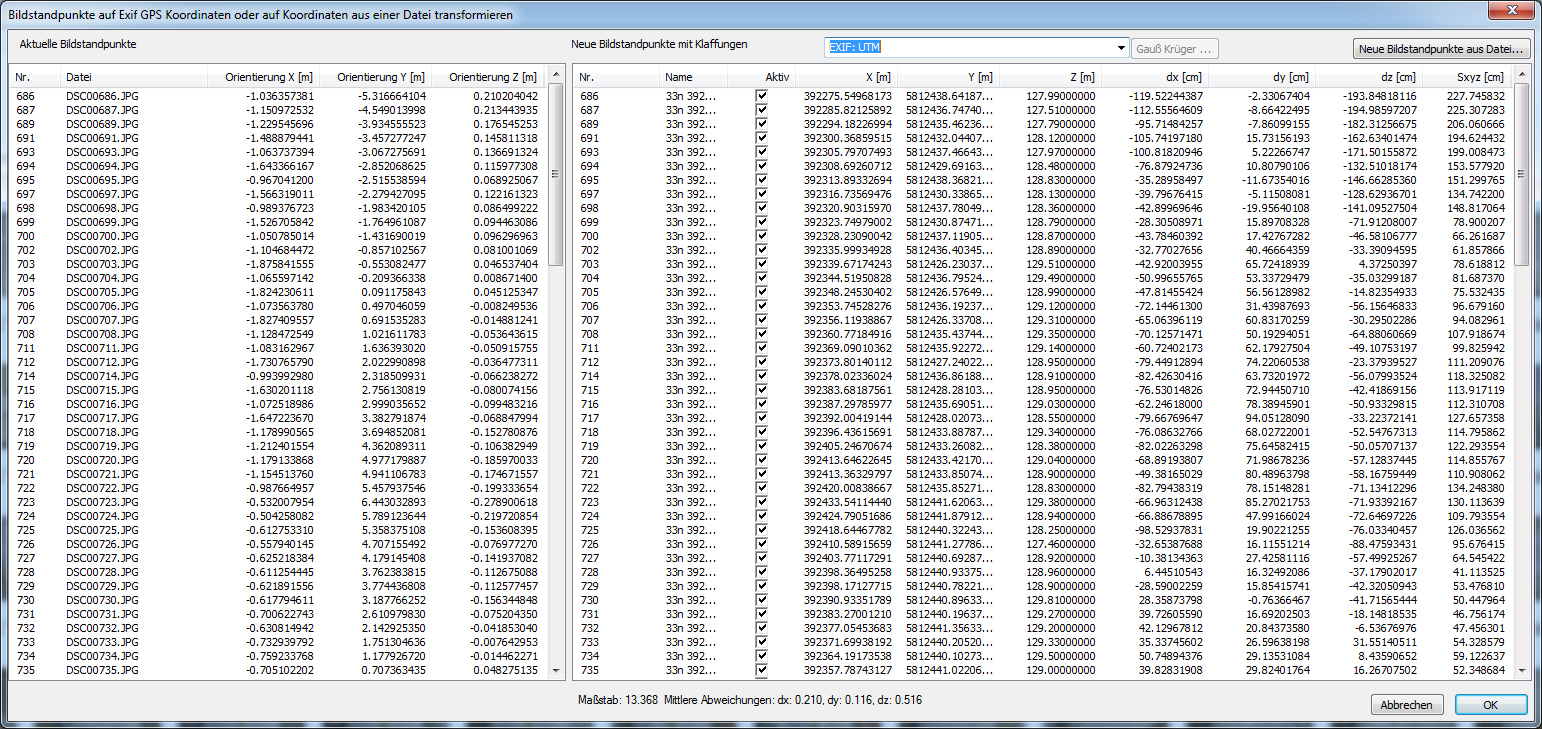
In der linken Spalte des Dialoges sehen Sie die Koordinatenwerte der Bilder im aktuellen Koordinatensystem, in der rechten Spalte sind die transformierten Koordinatenwerte der Bilder und die Restklaffungen an den Bildstandpunkten. Bei "normalen" Drohnen-GPS sind Klaffungen im Bereich von bis zu 1-10m normal, bedingt durch die schlechten Genauigkeiten dieser GPS Koordinaten, bei sogenannten RTK Drohnen sind die Klaffungen normalerweise unter 10cm.
Aussreisser werden normalerweise automatisch erkannt, man kann auch mittels des [Aktiv] Checkboxen einzelne GPS Koordianten ein/ausschalten
Es können GPS Koordinaten als Textdatei verwendet werden, ELCOVISION 10 erkennt automatisch ob es sich um Kartesische Koordinaten oder Kugelkoordinaten handelt.
Datenformat GPS Koordinaten - Kartesische Koordinaten
Die Datei muss eine ASCII Datei sein. Dezimaltrennzeichen muss ein Punkt sein. Die einzelnen Spalten müssen durch mindestens ein Leerzeichen oder Tabulator oder ein Semikolon getrennt sein.
Dateiname X Y Z
Beispiel
DSC000113.jpg 55232.211 4733432.231 520DSC000114.jpg 55242.341 4733421.123 521
Datenformat GPS Koordinaten - Kugelkoordinaten
Die Datei muss eine ASCII Datei sein. Dezimaltrennzeichen muss ein Punkt sein. Die einzelnen Spalten müssen durch mindestens ein Leerzeichen oder Tabulator oder ein Semikolon getrennt sein.
Dateiname Länge Long Höhe
Beispiel
DSC000113.jpg 22.21132 35.212631 520DSC000114.jpg 22.21138 35.212623 521
Bildverband neu skalieren und optional verschieben
Wie bei der Definition eines Lokalen Koordinatensystemes kann über mindestens eine bekannte Strecke der Bildverband neu skaliert werden. Widersprechen sich die Strecken werden ebenfalls die Klaffungen rot markiert angezeigt.

Im Gegensatz zu der Definition eines Lokalen Koordinatensystemes bleibt die Ausrichtung des Bildverbandes erhalten. Der Objektpunkt der dem Koordinatenursprung (0,0,0) am nächsten ist wird als Ankerpunkt des Bildverbandes festgelegt und behält seine Koordinate.
Anwendung ist z.B. die richtige Skalierung eines Bildverbandes der mit einer nicht RTK Drohne fotografiert wurde.
Den Bildverband mittels einer Stereobasis skalieren
Ein Bildverband kann ebenfalls mittels einer bekannten Basisdistanz einer Stereokamera skaliert werden. Zusätzlich kann der Bildverband anhand eines Bildes ausgerichtet werden.
Wird ein richtig skalierter Bildverband verwendet, so kann die Basisdistanz einer Stereokamera selbst kalibriert werden.
Diese Funktion kann für normaler Stereokameras als auch für die Skalierung eines Bildverbandes von sphärischen Kameras die mittels eine Statives in einer Hoch und Tiefposition gefertigt wurden: Hier ist die Basisdistanz die Distanz zwischen der Hoch und Tief Position.
Sind die Kalibrationsdaten der Kameras nicht bekannt müssen die Bilder der linken und rechten Kamera in verschiedenen Verzeichnissen sein, damit diese getrennt während der automatischen Orientierung voneinander kalibriert werden können.
Bei sphärischen Aufnahmen muss das nicht gemacht werden, wenn nur eine Kamera und/oder Kamera- Objektivkombination verwendet wurde.
Wurden verschiedene Kameras verwendet, müssen die Bilder ebenfalls in verschiedenen Verzeichnissen sein, wenn "identische" Kameras d.h. 2 oder mehr gleiche Modelle verwendet wurden. Werden unterschiedliche Kameramodelle und/oder Objekte verwendet, so werden diese von ELCOVISION 10 automatisch getrennt voneinander kalibriert.
Es stehen folgende Methoden zur Skalierung zur Verfügung:
Bildverband nicht skalieren, nur ausrichten.
Die Skalierung des Bildverbandes bleibt unverändert, man kann jedoch ein Bild auswählen das das Objekt im gewünschten Koordinatensystem zeigt. In dieses Bild wird das ausgewählte Koordinatensystem zur besseren Verdeutlichung eingezeichnet.
Stereobildpaare über identische Dateinamen finden. Bilder müssen in verschiedenen Verzeichnissen sein.
Das ist die normale Option für Stereokameras. Man gibt die bekannte Basisdistanz unten in das Feld unterhalb der Liste "Neue Basisdistanz der Stereo Kamera" ein.
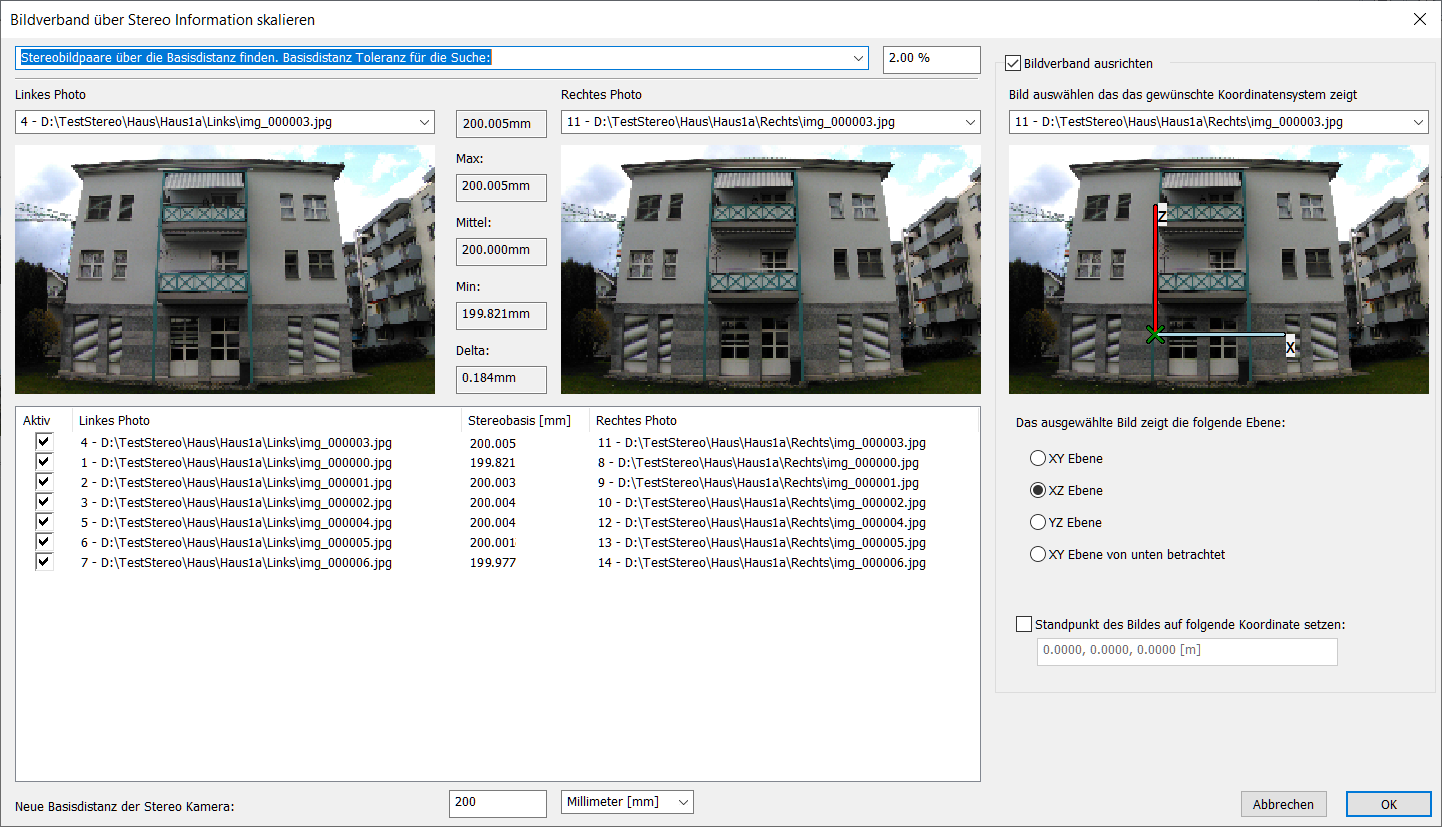
Stereobildpaare über die Basisdistanz finden. Basisdistanz Toleranz für die Suche:
Das ist die optimale Option für alle anderen Fälle. Man kann eine Suchtoleranz vorgeben, ELCOVISION 10 sucht anhand der Basisdistanz des ausgewählten Bildpaares alle anderen potentielle Stereobildpaare, z.B. "unten" und "oben" Bilder von sphärischen Kameras.
Man gibt die bekannte Basisdistanz unten in das Feld unterhalb der Liste "Neue Basisdistanz der Stereo Kamera" ein.
Sphärische Kameras: Distanz oberes und unteres Bild – Bilder definieren Z Achse - Distanz Toleranz für die Suche:
Wenn das Stativ kalibriert wurde, d.h. die Distanz zwischen der Hoch und Tief Position ist genau bekannt so selektiert man ein Bild der oberen Sphäre und untere Sphäre. Aus Genauigkeitsgründen sollten beide Bilder in die selbe Richtung blicken.
Als Distanz Toleranz sollte ein Wert von 0.2 .. 0.1% verwendet werden.
ELCOVISION 10 sollte nun alle „Stereo Bildpaare“ finden, falls nicht können folgende Probleme aufgetreten sein:
- Die gewählten Bilder wurden nicht von der „Oben“ und „unten“ Position des Statives gemacht.
- Es ist eine sehr schlechte Aufnahmekonfiguration vorhanden.
Durch Eingabe der bekannten Basisdistanz im Feld "Neue Basisdistanz der Stereokamera" wird der Bildverband neu skaliert.
Zum Ausrichten des Bildverbandes wählt man am besten ein Bild das:
- Entlang der X Achse des Objektes blickt, oder
- Entlang der Y Achse des Objektes blickt
Wird kein Bild zur Ausrichtung verwendet so ist der Bildverband nur mittels des Oberen und unteren Bildes in Z ausgerichtet, die Drehung um die Z Achse ist zufällig.
Kalibrieren von Stereokameras und Basisdistanzen.
Um die erforderlichen hohen Genauigkeiten zu erreichen muss man ein Testfeld mit ELCOVISION 10 Zielmarken aufbauen, bei der Kalibration von normalen Stereokameras reicht eine Wand wie diese:

Bei der Kalibration von Basisdistanzen von Stativen für Stereokameras sollten die Zielmarken über mindestens 2 Wände eines Raumes verteilt werden, am besten aber über alle 4 Wände.
Pro Wand sollten es mindestens 10 Zielmarken sein, die gleichmäßig aber leicht „zufällig“ verteilt sind, sie dürfen nicht „perfekt“ ausgerichtet sein.
Diese Zielmarken müssen dann sorgfältig eingemessen werden, das kann entweder mit einer zuvor an einer kalibrierten Kamera oder mittels eines Tachymeters geschehen. Die Koordinaten der Zielmarken müssen in einer .coo Datei als Vollpasspunkte gespeichert werden.
Kalibrieren der Kameras und der Stereobasis einer Stereokamera
Es werden nun normale Kalibrierbilder gefertigt, also „normale“, "hochkant – links", "hochkant –rechts", und "über Kopf", jeweils ein solcher Satz Bilder von 4-5 Standpunkten:

Wichtig ist dass die Bilder der linken und rechten Kamera in verschiedenen Verzeichnissen gespeichert werden! Nur dann kann ELCOVISION 10 die Bilder der linken und rechten Kamera eindeutig unterscheiden.
Dann sind folgende Schritte sind zu machen:
- Automatische Orientierung über natürliche Punkte die Bilder orientieren. Die Erkennung von Zielmarken muss eingeschaltet werden, die Kamerakalibrierung muss ebenfalls eingeschalten sein.
- Mit „Bildverband transformieren“ > „Den Bildverband auf ein Passpunktfeld transformieren“ der Bildverband auf die Zielmarkenkoordinaten transformieren Die Restklaffungen an den Passpunkten muss unter 1mm liegen. Falls nicht: Mit der Funktion „Bildverband transformieren“ > "Globale Orientierung" die fehlerhaften Bildmessungen suchen und entfernen.
- Die Kamerakalibrationsdatei "Projektname.cam" sollte in ein geeignetes Verzeichnis kopiert werden und bei den Einstellungen als Standard Kameradatei aktiviert werden.
Wenn nun die Funktion „Den Bildverband mittels einer Stereobasis skalieren“ aufgerufen wird ist direkt die kalibrierte Basisdistanz in dem Feld „Mittel“ sichtbar. Wichtig ist das Delta, die Differenz von Max – Min, weniger als 0.2mm betragen sollte, speziell wenn die Basisdistanz klein ist, z.B. 200mm oder weniger sollte Delta noch kleiner sein, hier sind Werte < 0.1mm anzustreben. Das kann wieder durch die „Bildverband transformieren“ > "Globale Orientierung" geschehen.
Kalibrieren einer Sphärischen Kamera
Bei sphärischen Kameras sollte die Kamera zuerst „normal“ kalibriert werden und dann in einem 2. Schritt auf das Stativ montiert werden.
Kalibrieren eines Statives
Das Stativ in mindestens 4-5 Positionen aufstellen und jeweils „Hoch“ und „Tief“ Sphärische Bilder anfertigen. Es sollte darauf geachtet werden dass immer möglichst alle Zielmarken an allen Wänden in den Bildern sichtbar sind. Dann sind folgende Rechenschritte erforderlich:
- Mit „Automatische Orientierung mit natürlichen Punkten“ die Bilder orientieren, hier die Erkennung von Zielmarken einschalten. Keine Kamerakalibrierung, den Kamera müssen die Kalibrationsdaten der vorherigen Kamerakalibrierung zugewiesen werden, das passiert automatisch wenn die Kameradatei aus Standardkameradatei in den Einstellungen selektiert wird.
- Mit „Bildverband transformieren“ > „Den Bildverband auf ein Passpunktfeld transformieren“ der Bildverband auf die Zielmarkenkoordinaten transformieren Die Restklaffungen an den Passpunkten muss unter 1mm liegen. Falls nicht: Mit der Funktion „Bildverband transformieren“ > "Globale Orientierung" die fehlerhaften Bildmessungen suchen und entfernen.
Wenn nun die Funktion „Den Bildverband mittels einer Stereobasis skalieren“ aufgerufen wird ist direkt die kalibrierte Basisdistanz des Statives in dem Feld „Mittel“ sichtbar. Auch hier sollte der Wert "Delta" kleiner als 0.5mm sein um gute Absolute Genauigkeiten zu erreichen.
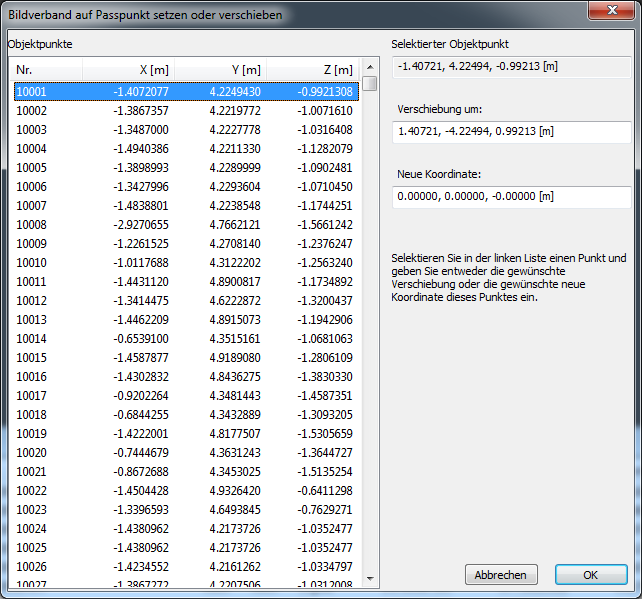
Den Bildverband auf einen Punkt setzen oder verschieben
Diese Funktion ist für verschiedene Sonderanwendungen nützlich, z.B. für genaues aufeinandertransformieren von Bildverbänden die zu unterschiedlichen Zeiten aufgenommen wurden. Man kann entweder eine Verschiebung oder eine neue Koordinaten für einen frei wählbaren Punkt eingeben, die Felder in dem Dialog werden dann automatisch entsprechend aktualisiert.
Globale Orientierung
Hier können Bildverbände manipuliert,Kameras nachkalibriert, fehlerhafte Bildmessungen gefunden werden,