Berechnen einer Hochdichten Punktewolke
Überblick
Für die Berechnung der hoch dichten Punktewolke muss der Rechner über eine NVIDIA Grafikkarte mit mindestens 4GB RAM verfügen, und es muss ein aktueller Treiber installiert sein der mindestens CUDA 9.1. besser 10.0 oder neuer unterstützt. Die Berechnung selbst ist ein enorm rechenintensiver und speicherintensiver Prozess, der bei großen Projekten durchaus mehrere Stunden dauern kann.
Für die Berechnung werden die Bilder auf eine vom Anwender bestimmte Größe herunter skaliert und dann wird für jedes Pixel dieser herunterskalierten Bilder, wenn möglich, ein 3D Punkt erzeugt. Je kleiner diese Bildgrösse ist, desto schneller ist die Berechnung, aber desto gröber wird das Resultat. Auch sind z.B. kaum noch Details zu erkennen wenn mit Bildgrößen von < 800 Pixeln gerechnet wird. Allerdings reichen solche Auflösungen durchaus aus um sehr gute Geländemodelle in kurzer Zeit zu berechnen
Man kann die Berechnung auch bei großen Bildern ein wenig beschleunigen, wenn man der Software eine obere Schranke für die Bilduntersuchungen setzt. Diese sollte aber nicht zu klein sein, damit nicht eventuell Löcher in der Rekonstruktion entstehen, ELCOVISION 10 will mindestens 10 Nachbarbilder untersuchen. Mehr als 25 Nachbarbilder führt in der Regel nur zu größeren Rechenzeiten aber zu keinen Verbesserungen mehr.
Bricht die Berechnung mit einem Fehler: „Speicher voll“ ab, so kann man diese wiederholen in dem man weniger Nachbarbilder berücksichtigt, oder wenn man die Bilder weiter herunter skalieren lässt. Oder man besorgt sich eine Grafikkarte mit mehr Speicher.
Start der Berechnung
Es kann jederzeit eine neue hochdichte Punktewolke dazugerechnet werden. Der Start erfolgt mit „Hochdichte Punktewolke“ in der Ribbonleiste:
Die erste Seite des Assistenten für Hochdichte Punktewolken erscheint:
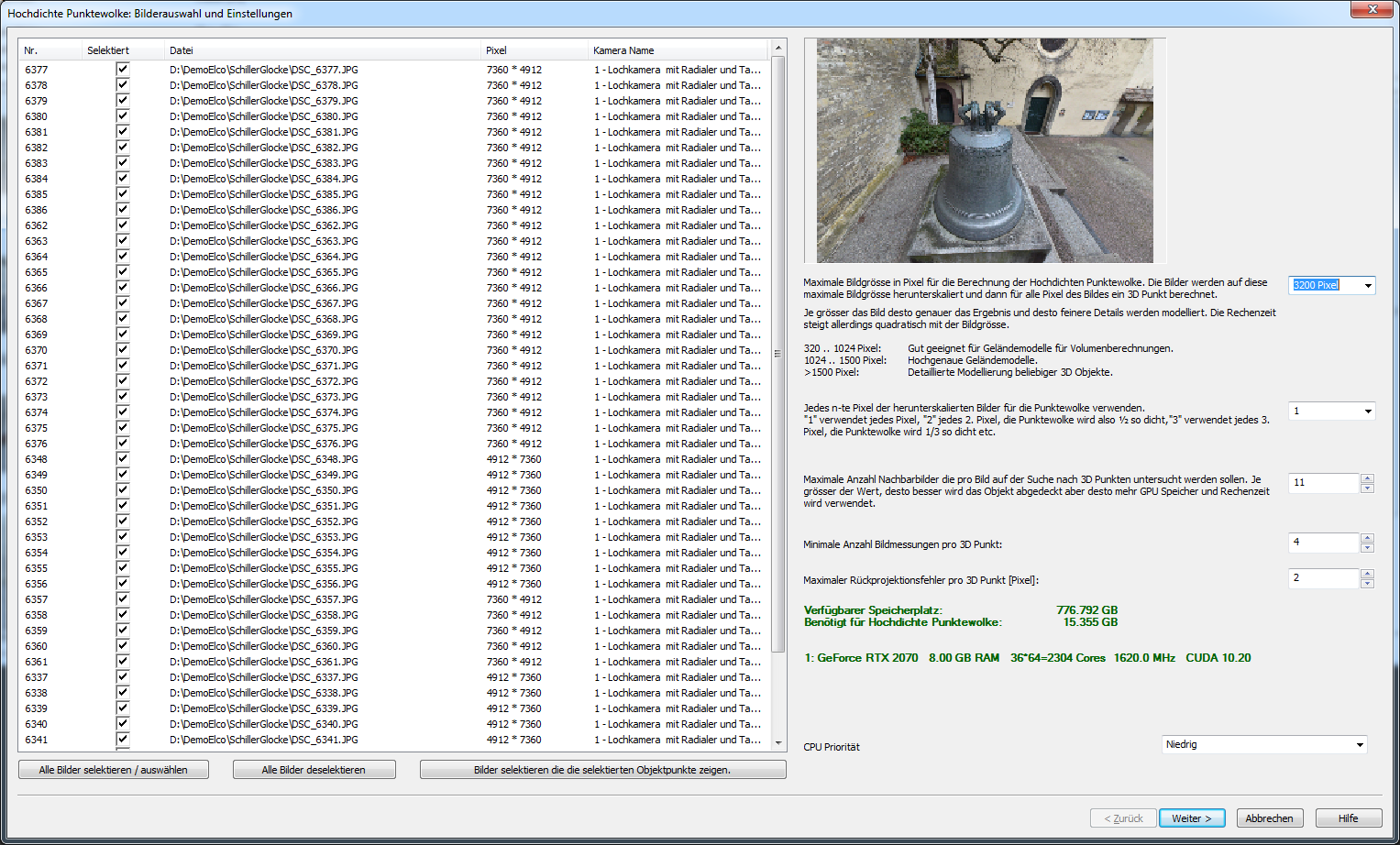
Minimale Anzahl Bildmessungen pro 3D Punkt
Hier sollte der Wert 3 nicht unterschritten werden, damit die Punktewolke nicht zu schlecht wird. Mehr als 6..8 bringt allerdings keine Verbesserung mehr.
Maximaler Rückprojektionsfehler pro 3D Punkt in Pixel
Jeder 3D Punkt der Punktewolke ist das Ergebnis einer Mehrbildmessung und ist dadurch auch mit Fehlern behaftet. Hier wird eingestellt welche maximale Distanz eingehalten werden muss wenn der 3D Punkt zurück in das Bild projiziert wird: Abstand projizierte Punkt – Punkt der gemessen wurde.
Der eingestellte Wert von 2 Pixel ist ein guter Kompromiss zwischen Genauigkeit und dichte der Punktewolke.
Danach drücken Sie auf [Start!].Nach einiger Zeit erhalten Sie das Ergebnis:


Tipps und Tricks
Für die Berechnung der Hochdichte Punktewolke sollte das Projekt auf einer lokalen Festplatte sein, nicht auf einem Netzwerklaufwerk. Wenn es auf einer SSD ist, ist die Berechnung nochmal um bis zu 30% schneller.
Nach der Berechnung empfiehlt es sich das Verzeichnis mit dem temporären Daten wie vorgeschlagen zu löschen, da dort durchaus mehrere GB an temporären Daten anfallen können.