Automatische Orientierung mit natürlichen Punkten
Überblick
Für die Berechnung der Automatischen Orientierung sollte der Rechner über eine NVIDIA Grafikkarte mit mindestens 4GB RAM verfügen, und es muss ein aktueller Treiber installiert sein der mindestens CUDA 9.1. besser 10.0 oder neuer unterstützt. Dann wird die Berechnung in enormer Geschwindigkeit durchgeführt. Ohne GPU Unterstützung dauert die Berechnung bis zu 50 mal länger.
Der Ablauf der automatischen Orientierung ist wie folgt: ELCOVISION 10 untersucht die Bilder auf markante Punkte, potentielle homologe Punkte, mit einer Geschwindigkeit von < 0.5s für 35MPixel Bilder, das Finden von Bildpaaren für die spätere Orientierung wird mit bis zu mehreren Dutzend Bilderpaaretests pro Sekunde durchgeführt. Die anschließende Orientierung selber orientiert auch über sehr große Bildverbände im Schnitt alle 1-3 Sekunden ein Bild. Dabei können auch gleichzeitig die Kamera(s) kalibriert werden. Bei der Simultankalibration sind allerdings die erreichten Genauigkeiten ein wenig schlechter als mit vorher kalibrierten Kameras. Auch sollte die Aufnahmekonfiguration dabei nicht allzu schlecht sein, d.h. es sollte eine gewisse Tiefenausdehnung in den Photos sein, wenn gekantete Bilder vorhanden sind (Quer und Hochformat, auf dem Kopf stehendes Hoch und Querformat) kann auch die Hauptpunktlage vernünftig kalibriert werden.
Optional kann direkt nach der Orientierung eine Hochdichte Punktewolke gerechnet werden. Dadurch kann ein Objekt in „einem Rutsch“ vollständig 3D rekonstruiert werden.
Start der automatischen Orientierung
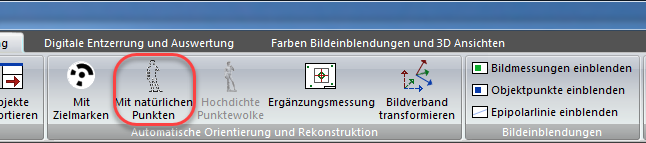
Starten Sie die automatische Rekonstruktion mittels "Automatische Orientierung und Rekonstruktion" - "Mit natürlichen Punkten"
Falls das Projekt noch nicht gespeichert wurde erscheint ein „Speichern unter“ Dialog Speichern Sie das Projekt wenn möglich auf eine lokale Festplatte, am besten eine SSD mit genügend freiem Platz für die temporären Daten die von ELCOVISION 10 erzeugt werden.
Startseite Automatische Orientierung
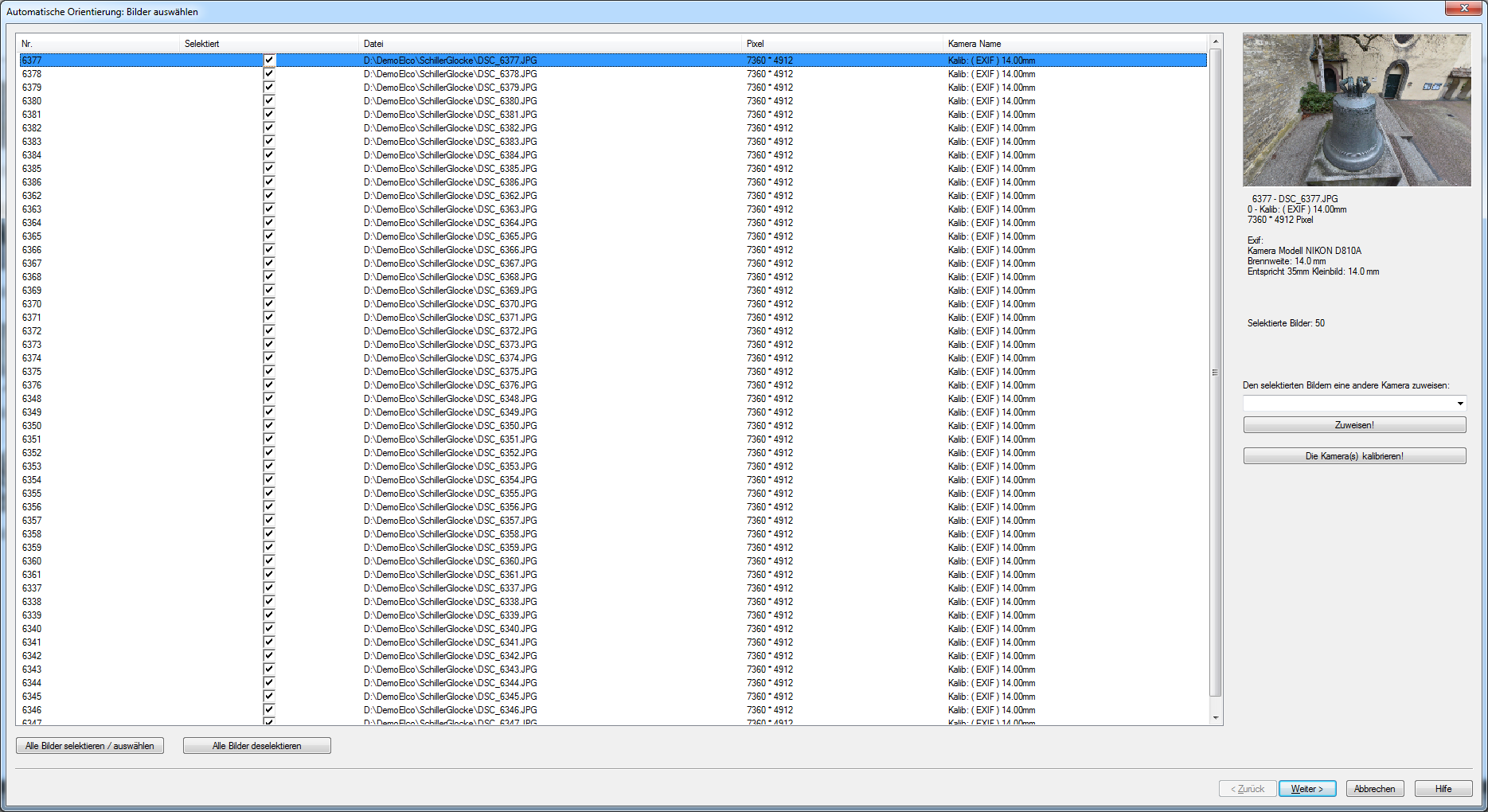
Hier kann definiert werden ob schon vorab kalibrierte Kameras den Bildern zugewiesen werden sollen oder nicht. Sind passende kalibrierte Kameras in der eingestellten Kameradatei so weist ELCOVISION 10 diese automatisch den Bilder zu. Sind mehr als ca. 5 Bilder vorhanden, so kann ELCOVISION 10 eine ausreichend gute Simulatankalibrierung während der Orientierung rechnen.
Zuweisen
Weist den Selektierten Bildern in der Liste die in der Auswahlbox ausgewählte Kamera zu.
Die Kamera(s) kalibrieren
Alle selektierten Bilder in der Liste werden für die Kalibrierung vorgemerkt.
Seite Kamera Kalibrierung
Wenn Kameras zur Kalibrierung vorgemerkt sind folgt diese Seite. Hier kann die Kamera Kalibrierung gesteuert werden
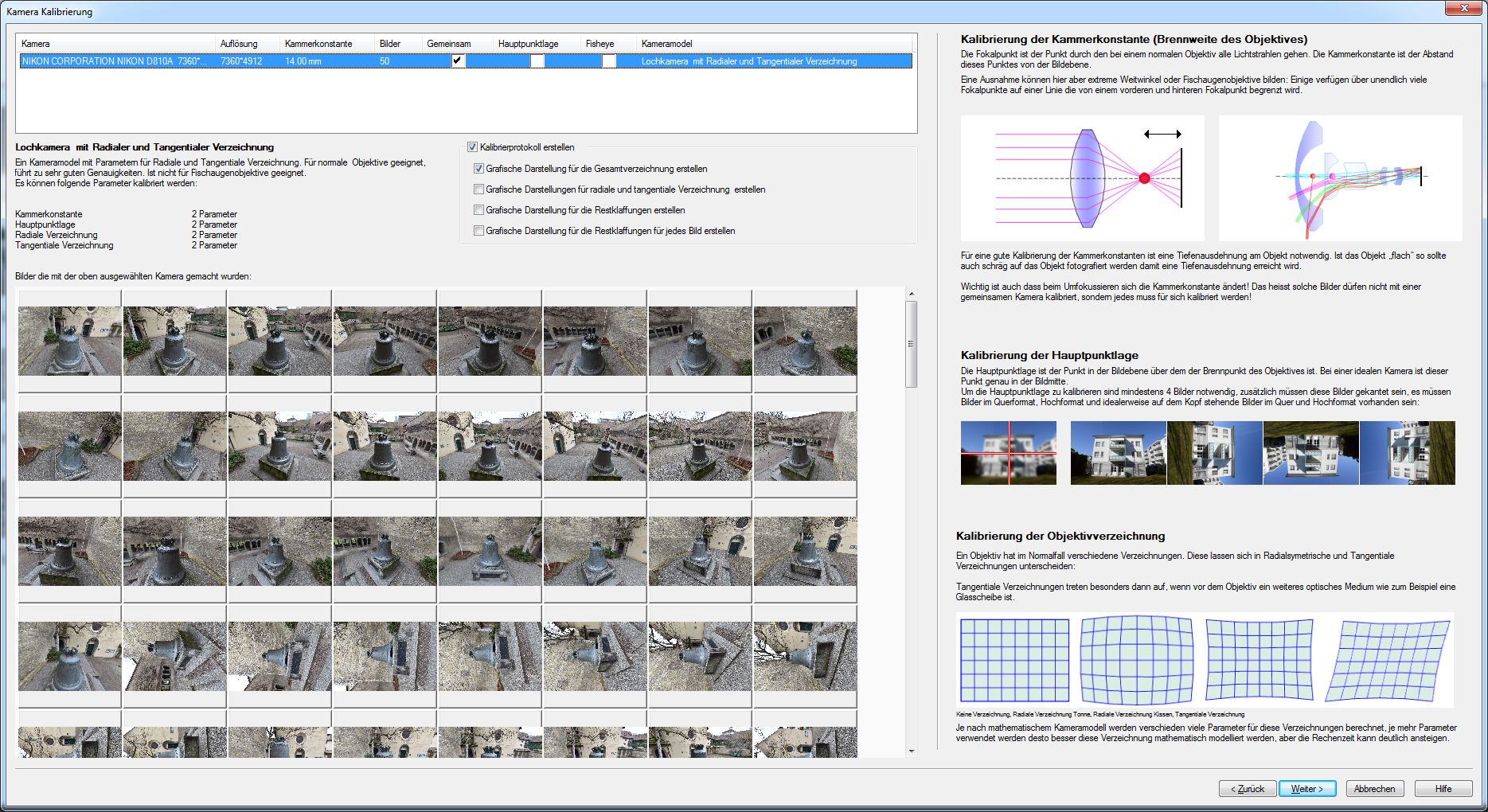
Kamera Liste
Hier sind alle unterschiedlichen Kameras aufgelistet die ELCOVSION 10 anhand von EXIF-Daten unterscheiden konnte. Einige der Spalten sind bearbeitbar: Klicken Sie 2 mal langsam in ein Feld und es öffnet sich ein Bearbeitungsfeld oder eine Auswahlbox.
Spalte Kamera
Hier sind die Kamerabezeichnung gelistet. Diese Spalte ist nicht editierbar.
Spalte Auflösung
Hier ist die Auflösung der Bilder dieser Kamera gelistet. Diese Spalte ist nicht editierbar.
Spalte Kammerkonstante
Hier ist die Apriori Kammerkonstante (Brennweite) des Objektives gelistet. Sind Exif Daten verfügbar weist ELCOVISION 10 diese zu, falls nicht wird die CCD Diagonale verwendet. Ist diese grob falsch können Sie diese editieren.
Spalte Bilder
Hier ist die Anzahl Bilder gelistet die vermutlich die selbe Kamera / Objektivkombination verwendet haben.
Spalte Gemeinsam
Ist das Kästchen angehakt, so werden aller Bilder gemeinsam kalibriert. Sind die Bilder mit unterschiedlichen Fokuseinstellungen gemacht, so darf es nicht angehakt sein. Dann wird jedes Bild für sich kalibriert. Das führt jedoch zu Genauigkeitseinbussen.
Spalte Hauptpunktlage
Sind gekantete Bilder in dem Projekt so kann dieses Kästchen angehakt werden um die Hauptpunktlage zu kalibrieren. Stellt ELCOVISION 10 bei der Bildorientierung fest dass keine gekannteren Bilder vorhanden sind, so wird diese Einstellung ignoriert. Wird das Kästchen nicht angehakt, ist die Orientierungsberechnung ein wenig schneller.
Spalte Fischeye
Wird es angehakt so wird den Bildern ein mathematisches Kameramodel zugewiesen dass Fischaugenobjektive modellieren kann
Spalte Kameramodel

Hier kann ausgewählt werden welches mathematisches Kameramodel verwendet werden soll. In der Beschreibung unter der Liste wird genau erklärt was das ausgewählte Kameramodel beschreiben kann.
Seite Automatische Orientierung: Information und Start
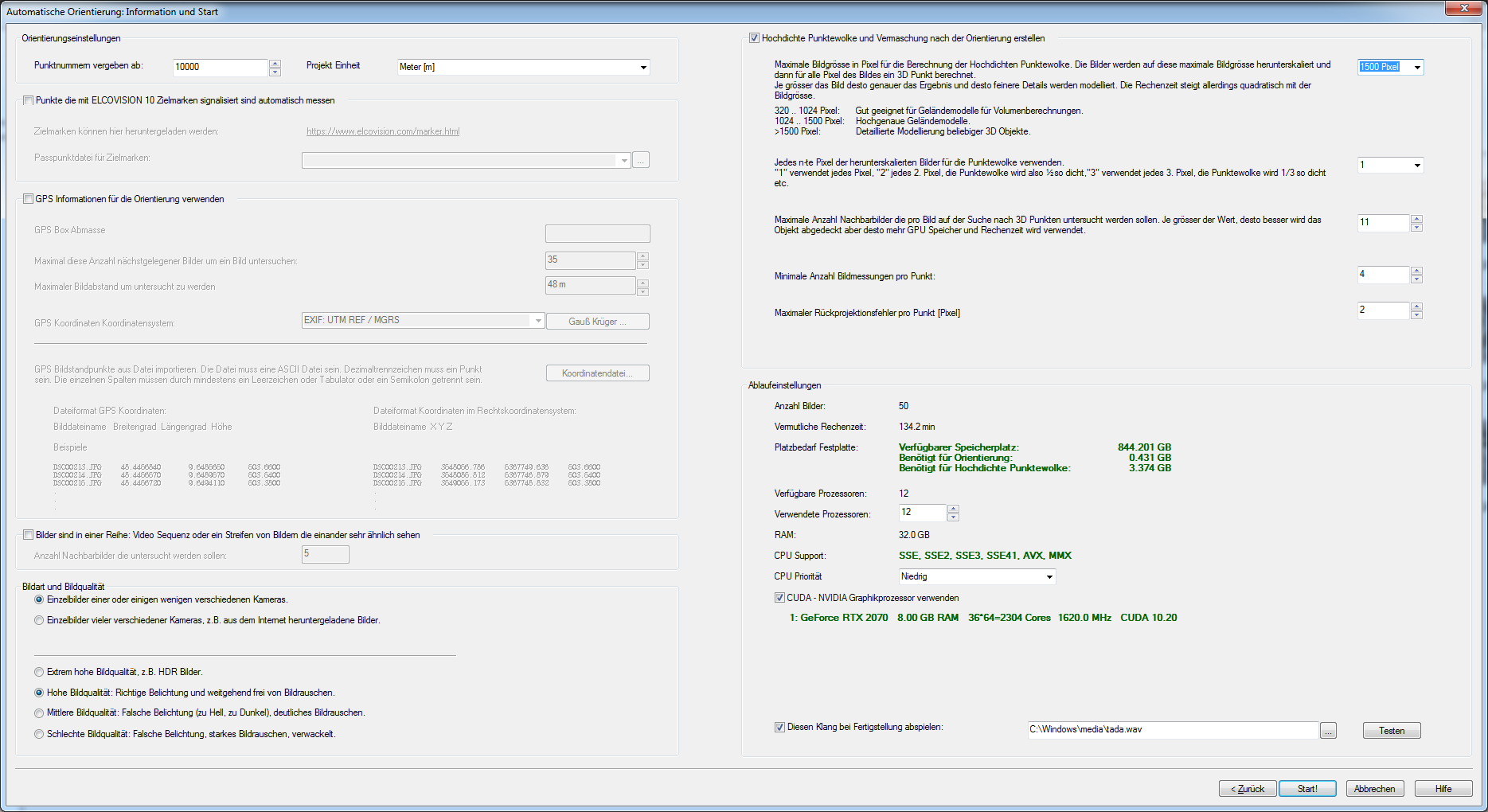
Hier kann die Berechnung genauer gesteuert werden.
Seite Automatische Orientierung: Analysiere Bilder
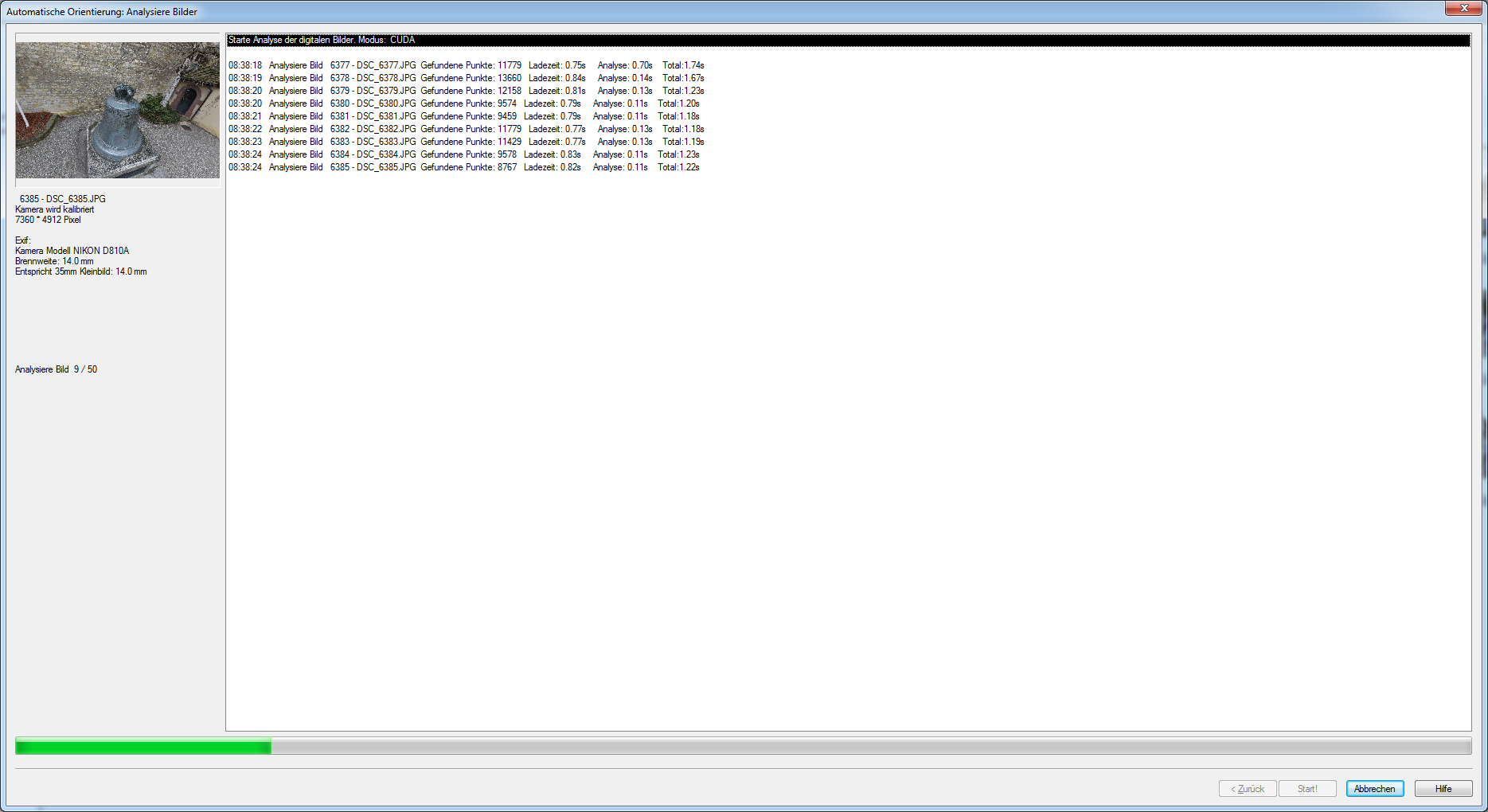
Hier wird der Bearbeitungsfortschritt protokolliert.
Seite Automatische Orientierung: Orientiere Bilder
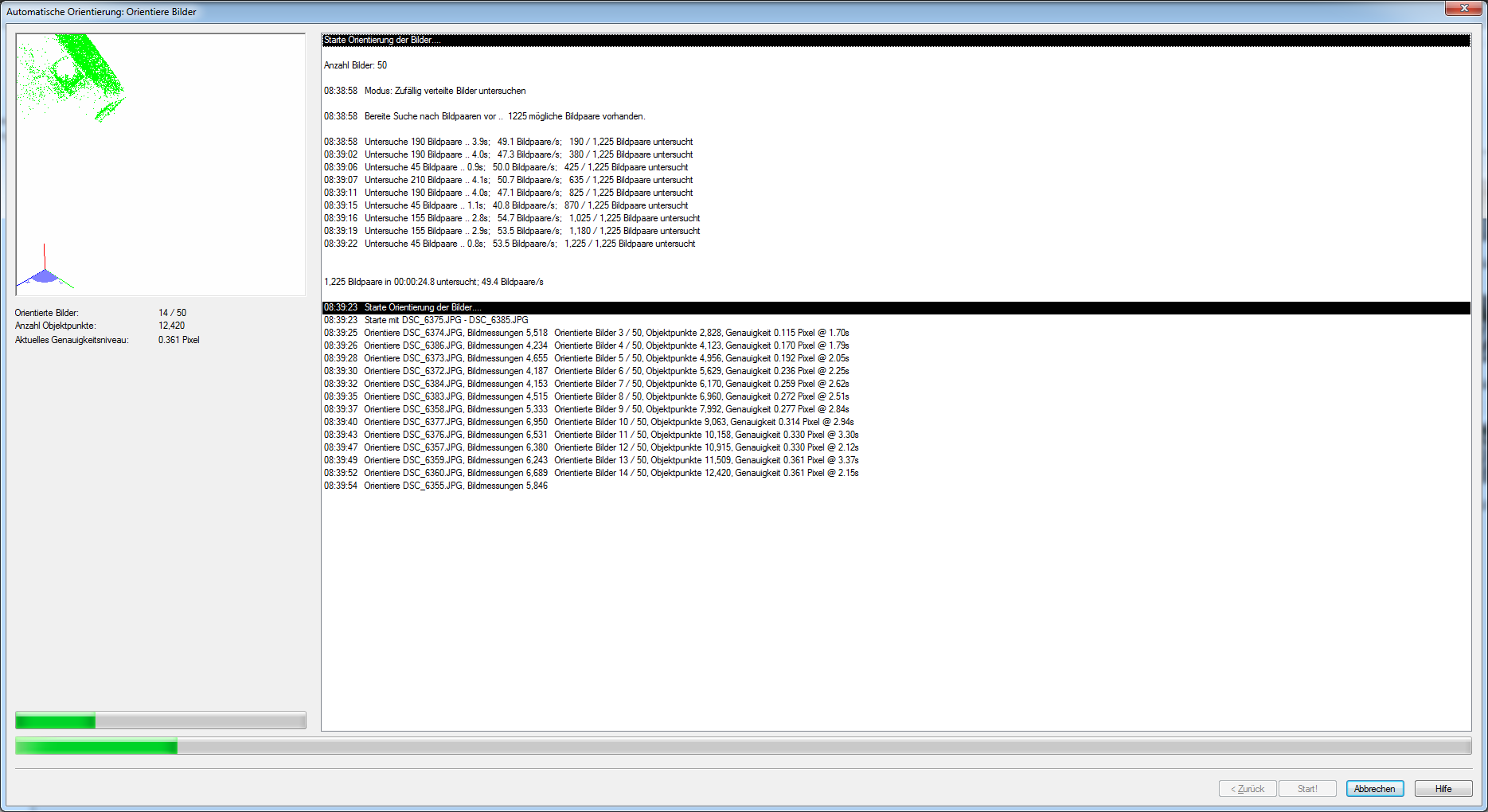
Hier wird der Bearbeitungsfortschritt protokolliert.
Seite Automatische Orientierung: Ergebnis

Hier wird das Ergebnis der Orientierung angezeigt.
Passen die Bilder aus irgendeinem Grund nicht alle in einen Bildverband, z.B. weil die Bilder verschiedene Objekte zeigen, so berechnet ELCOVISION 10 mehrere Bildverbände. Mit der Auswahlbox rechts oben kann entschieden werden welcher Bildverband in das Projekt übernommen werden soll.
Tipps und Tricks
Sind Sie nicht sicher ob Objektive mit Fischaugeneigenschaften verwendet wurden oder nicht, wählen Sie bei Kamera Kalibrieren in der Kameraliste "Lochkamera /Fisheye Kameramodell mit Radialer und Tangentialer Verzeichnung " aus. Sie erhalten dann garantiert ein Ergebnis, die Rechenzeit ist allerdings ein wenig länger.
Wenn Sie mit einer Drohne Fassadenaufnahmen gemacht haben, und Sie die Fassade auf und ab geflogen sind, ist es oftmals besser die GPS Auswertung in der Automatischen Orientierung abzuschalten.